|
Cunxi (Jimmy) Dai I'm a Ph.D. student at CMU RI advised by Prof. Guanya Shi. Previously, I was a MSR student advised by Prof. Ralph Hollis, Previous to CMU, I worked with Prof. Zhenzhong Jia, Prof. Mingming Zhang at SUSTech and Prof. Hugh Herr at MIT Media Lab. I'm interested in robots 🦾 that assist human👫 in all sorts of ways. Currently, I'm focusing on designing algorithms that enable humanoid robots to adapt intelligently to uncertainties during loco-manipulation! Email / CV / Google Scholar |

|
News
- 🎉2025.8: Starting my Ph.D. after a wonderful summer interning at Dexmate!
- 🎉2025.2: Paper on Bi-Level MPC wall-pushing accepted to ICRA 2025, Atlanta:D.
- 🎉2024.10: Paper Selected as Best Papaer Finalist in Mobile manipulation at IROS 2024!
- 🎉2024.6: Paper accepted to IROS 2024 as Oral Presentation.
- 🎉2023.8: I will join CMU Robotics Institute as a graduate student!
- 🎉2023.4: Finished SWheg series robots, marked a mile-stone for a 2-year long project!
- 🎉2022.5: Finished incredible time at MIT MechE as a special student.
- 🎉2022.2: Paper selected as Best Paper Finalist at ICARM 2022.
Research
|
|
BFM-Zero: A Promptable Behavioral Foundation Model
for Humanoid Control Using Unsupervised
Reinforcement Learning
Yitang Li*, Zhengyi Luo*, Tonghe Zhang$, Cunxi Dai$, Andrea Tirinzoni, Anssi Kanervisto, Haoyang Weng, Kris Kitani, Mateusz Guzek, Ahmed Touati, Alessandro Lazaric, Matteo Pirotta, Guanya Shi in-submmision, 2026 arXiv / webpage BFM-Zero is a behavioral foundation model that learns a shared latent space over motions, goals, and rewards via unsupervised RL, letting a single humanoid robot policy be prompted to perform diverse whole-body tasks in the real world. |
|
|
Interactive Navigation with Adaptive Non-prehensile Mobile
Manipulation
Cunxi Dai*, Xiaohan Liu*, Koushil Sreenath, Zhongyu Li, Ralph Hollis RA-L, 2025 arXiv / webpage A holistic framework for dynamic interactive navigation that leverages learned representations for rapid adaptation to object dynamics, and utilizes model-based prediction to inform decision-making. |
|
|
Wallbounce : Push wall to navigate with Contact-Implicit MPC
Xiaohan Liu*, Cunxi Dai*, Roberto Shu, John Z. Zhang, Arun Bishop, Zachary Manchester, Ralph Hollis ICRA, 2025 webpage A bi-level MPC framework that enable non-preodic upper-body contact to achieve more agile locomotion. |
|
|
Wheelchair Maneuvering with a Single-Spherical-Wheeled Balancing Mobile Manipulator
Cunxi Dai*, Xiaohan Liu*, Roberto Shu, Ralph Hollis IROS 2024, Oral Presentation Best Paper Finalist in Mobile Manipulation, IROS 2024 arXiv / YouTube / New Scientist / Video Friday Wheelchair maneuvering with Ballbot that balance on a single-spherical wheel. |
|
|
SWheg: A Wheel-Leg Transformable Robot With Minimalist Actuator Realization
Cunxi Dai*, Xiaohan Liu*, Jianxiang Zhou*, Zhengtao Liu, Zhenzhong Jia in submission to Journal of Field Robotics (JFR) arXiv / YouTube Minimalist actuator realization of a wheel-leg transformable robot with tendon-driven transformation wheel module. |
|
|
Swhegpro: A novel robust wheel-leg transformable robot
Cunxi Dai, Xiaohan Liu, Zhenzhong Jia ROBIO 2023 Paper / YouTube Robust design of a wheel-leg transformable robot for high-payload context. |
|
|
Human-Exoskeleton Misalignment Reduction on Knee Joint via an RPR Mechanism-Based Device
Cunxi Dai, Peiwen Fu, Bin Zhong, Kaiqi Guo, Mingming Zhang ICARM 2022 Best Paper Finalist, ICARM 2022 Paper / YouTube Knee joint misalignment reduction with an RPR mechanism-based device. |
Selected Projects |
|
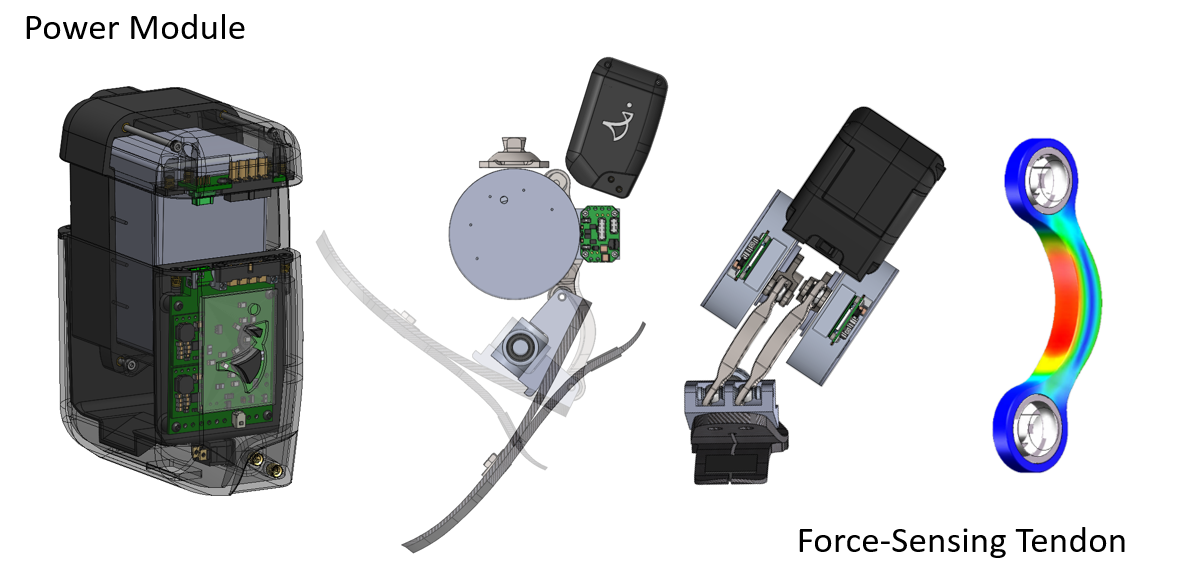
Power Management Module and Force-Sensing Tendon for 2-DoF Ankle-Foot Prosthesis
MIT Media Lab, Biomechatronics Lab, 2023 |
|
Template from Jon Barron. |